Accuracy scores for General VLM on the test subset (10,002 entries) of  PhysBench.
PhysBench.
PhysBench
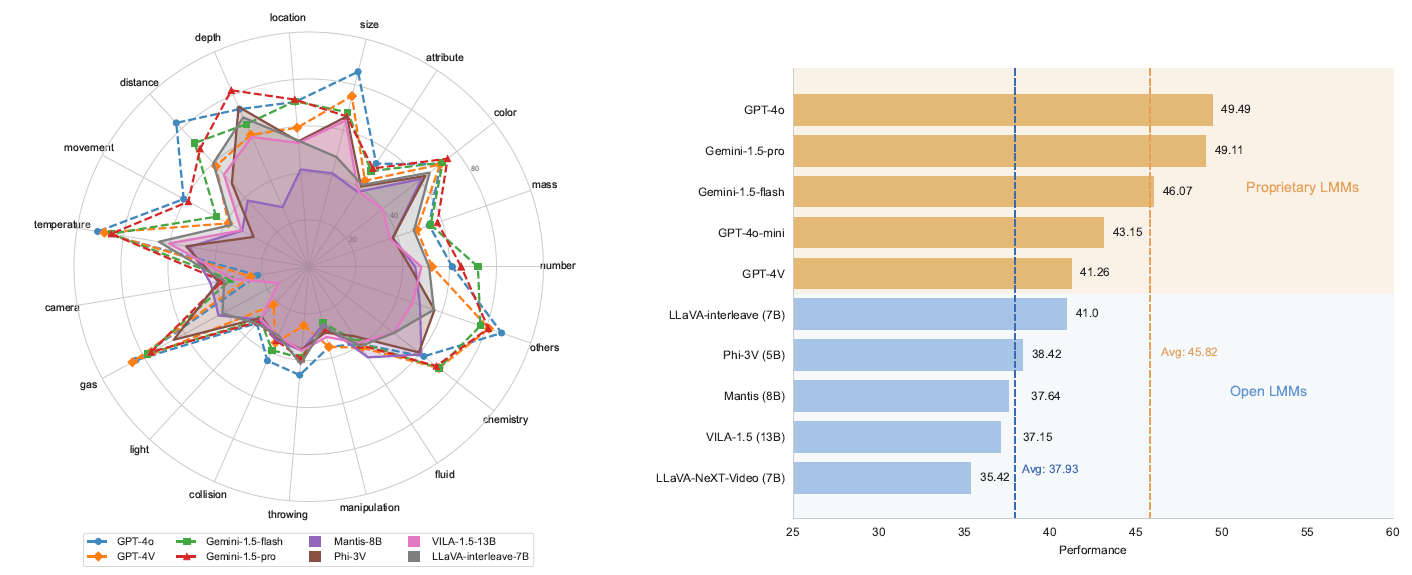
(a) The performance of 8 representative open-source VLMs across 19 sub-tasks in
PhysBench. The closer it is to the circular boundary, the better.
(b) The overall performance of those 8 VLMs. Closed-source models generally perform better.
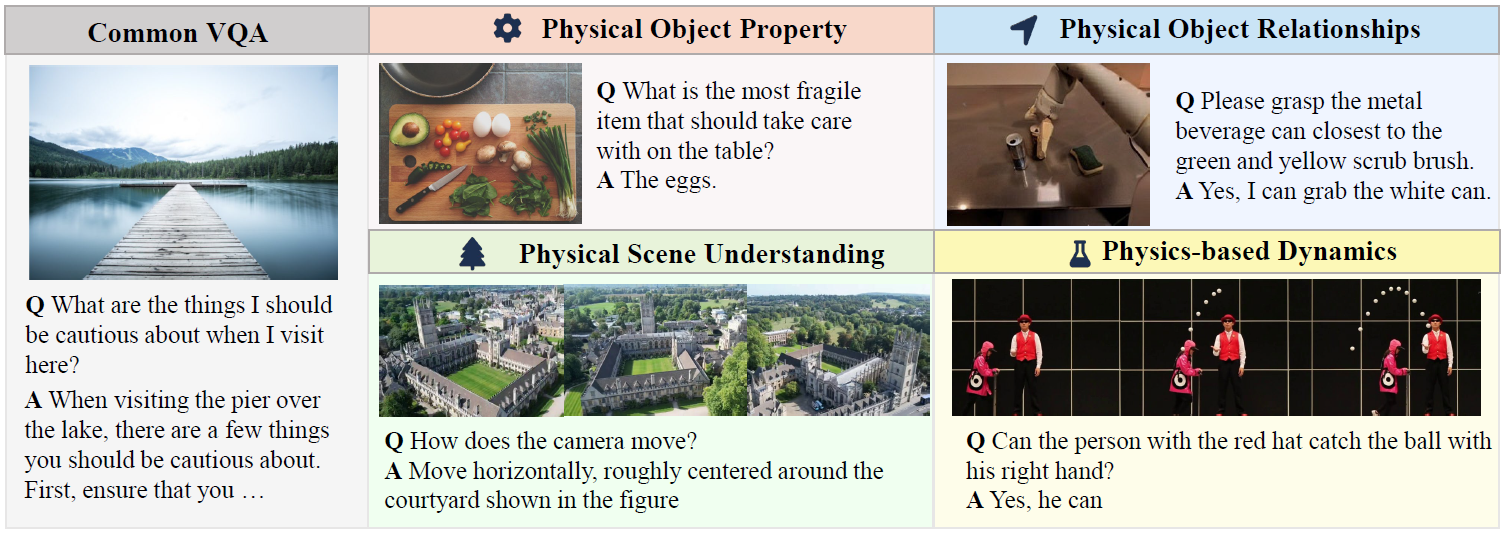
Common VQA tasks typically involve questions about visual content and general knowledge.
PhysBench emphasizes understanding the physical world, encompassing 4 dimensions.
Vision-Language Models (VLMs) have emerged as promising tools for building embodied agents, whereas their lack of physical world understanding hampers their effectiveness in real-world applications. To address this challenge, we present
PhysBench, a comprehensive benchmark designed to evaluate and enhance VLMs' understanding of the physical world across diverse and complex tasks.
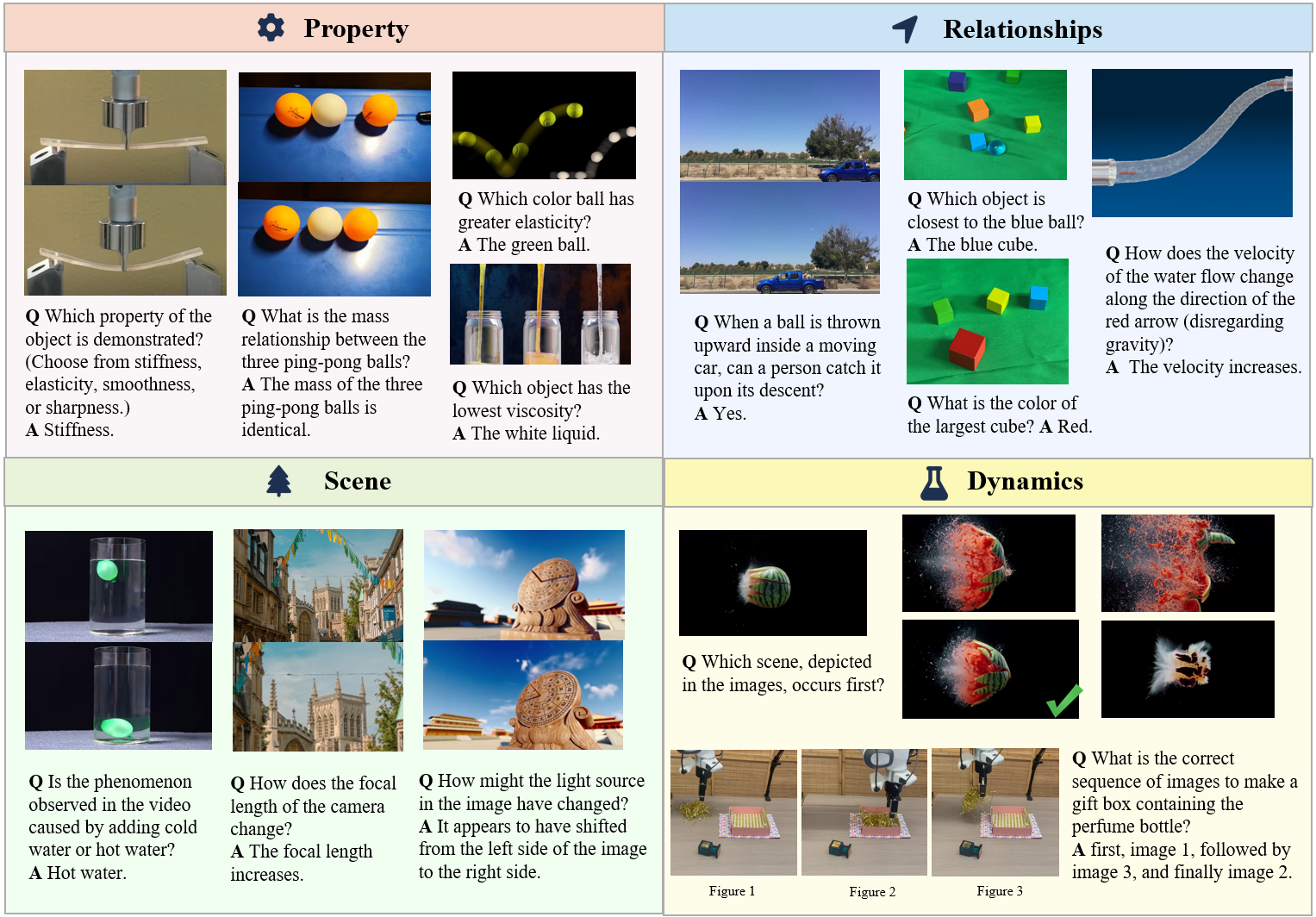
PhysBench is categorized into four major classes: physical object properties, physical object relationships, physical scene understanding, and physics-driven dynamics, covering 19 subclasses and 10 distinct capability dimensions.
Our extensive experiments on 75 representative VLMs reveal significant gaps in physical world understanding, likely due to the absence of physical knowledge in their training data. To improve VLMs' physical understanding, we propose an agent-based method called PhysAgent, which leverages prior physical knowledge and expert model assistance to enhance physical world understanding capabilities.
Furthermore, we demonstrate that improving VLMs’ understanding of the physical world can significantly facilitate the deployment of embodied agents in real-world scenarios, moving towards bridging the gap between human and machine intelligence in comprehending the physical world.
Accuracy scores for General VLM on the test subset (10,002 entries) of
PhysBench.
Accuracy scores for Image VLM and Video VLM on the test subset without interleaved data entries (8,099 entries) of
PhysBench.
🚨 To submit your results to the leaderboard, please send to this email with your result json files.
🚨 For more submission details, please refer to this link and this link.
PhysBench Dataset
We propose
PhysBench, which comprehensively evaluates VLMs' perception of the physical world across four major task categories:
Sampled PhysBench examples from four major dimensions
 PhysBench. and other physical understanding question-answering benchmarks reveals that
PhysBench is a comprehensive dataset, covering a wide range of tasks related to physical world understanding.
PhysBench. and other physical understanding question-answering benchmarks reveals that
PhysBench is a comprehensive dataset, covering a wide range of tasks related to physical world understanding.
The complete
PhysBench is organized into 19 subclasses and 10 distinct capability dimensions.
You can download the dataset on Hugging Face Dataset.
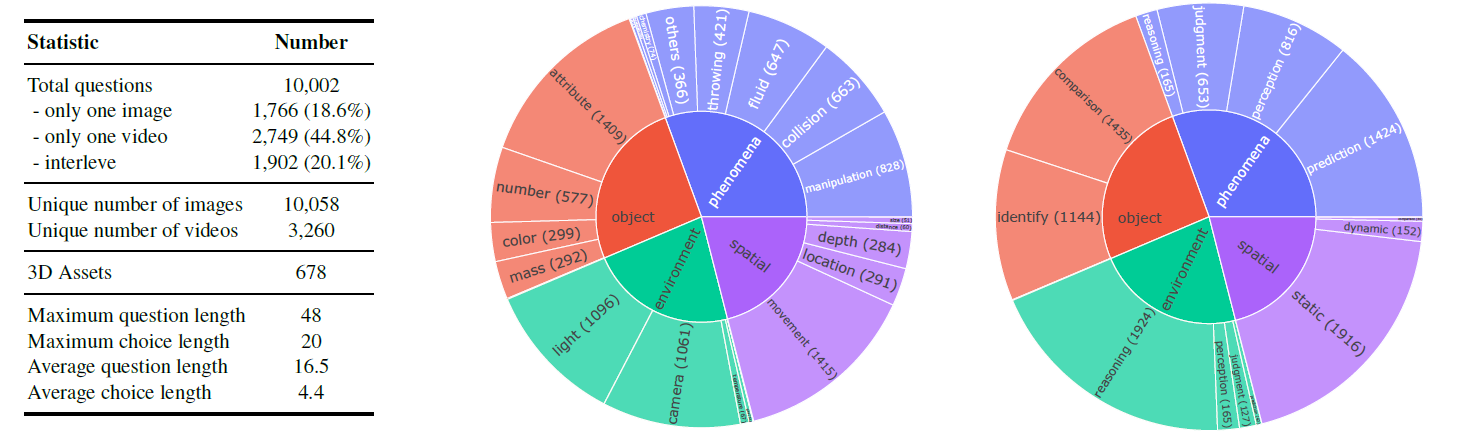
Key statistics of
PhysBench.
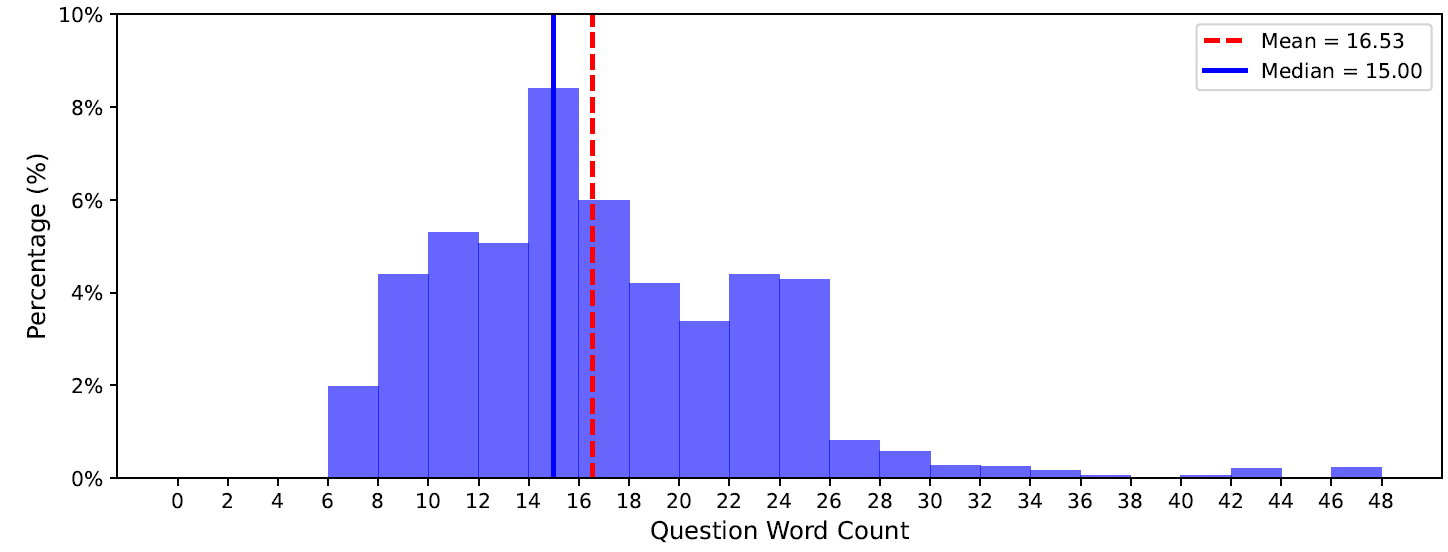
The distribution of the number of words per question in
PhysBench.
Questions with a length greater than 48 are categorized as 47 for visualization simplicity.
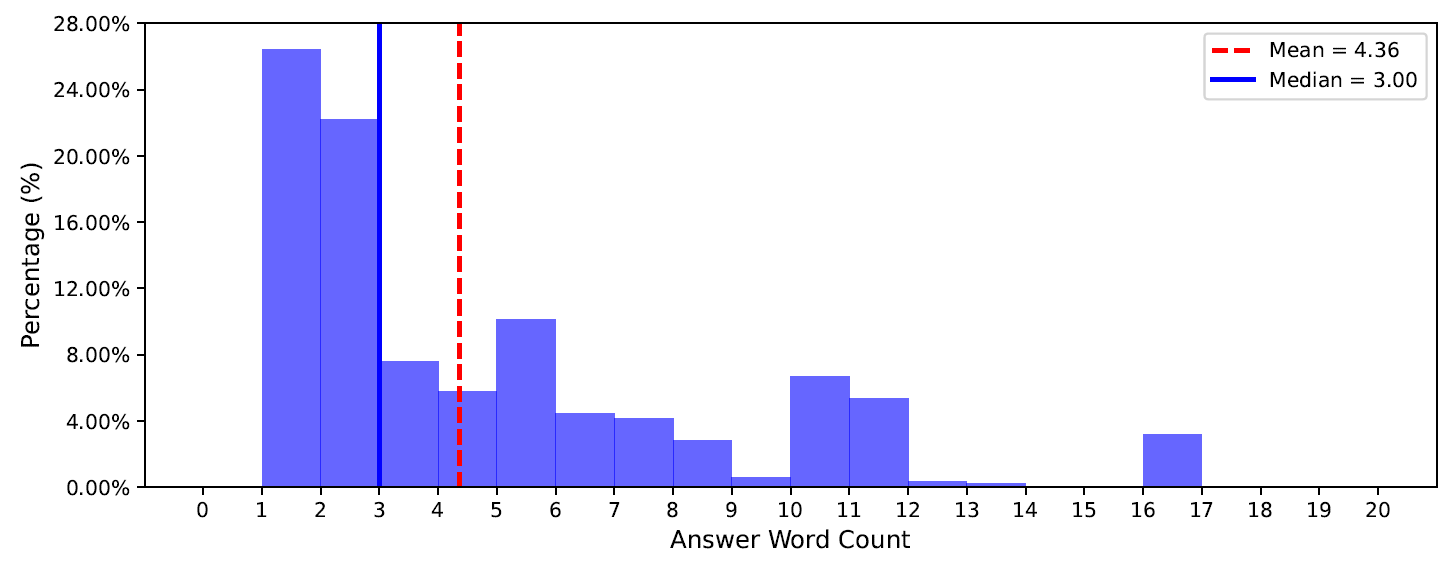
The distribution of the number of words per question in
PhysBench.
Options with a length greater than 20 are categorized as 20 for visualization simplicity.
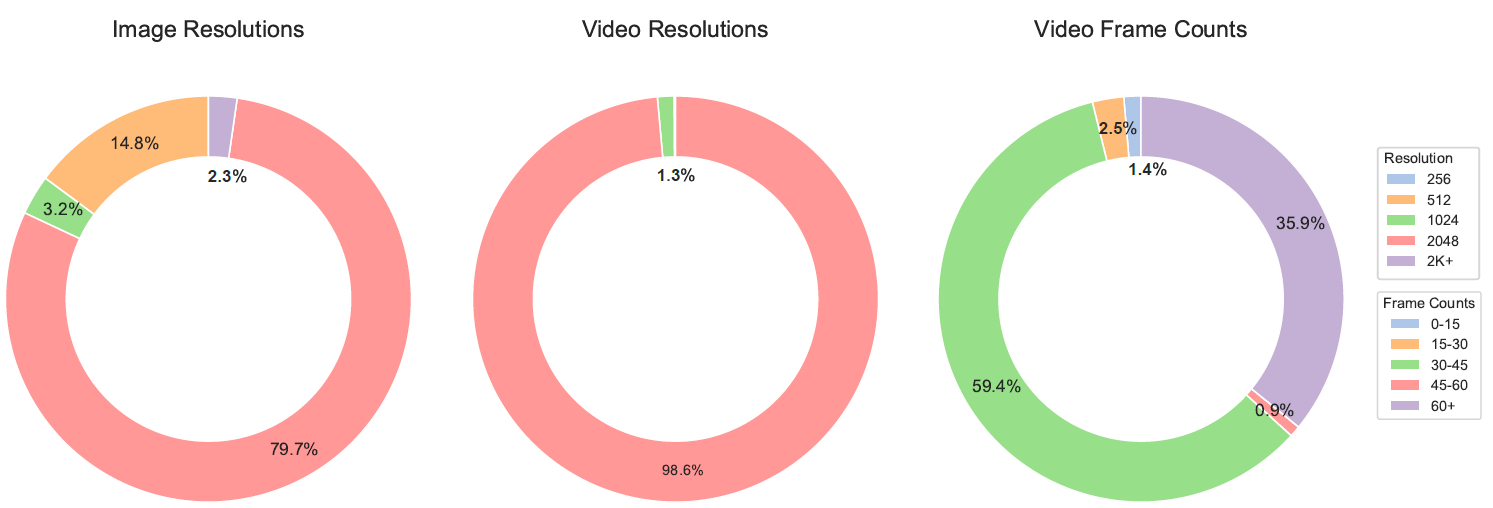
The distribution charts for image and video resolution, as well as video frame counts.
From left to right: the distribution of image resolution,
the distribution of video resolution, and the distribution of video frame counts.
To assess whether VLMs can understand the physical world, we evaluated 75 representative VLMs on
PhysBench and found that:
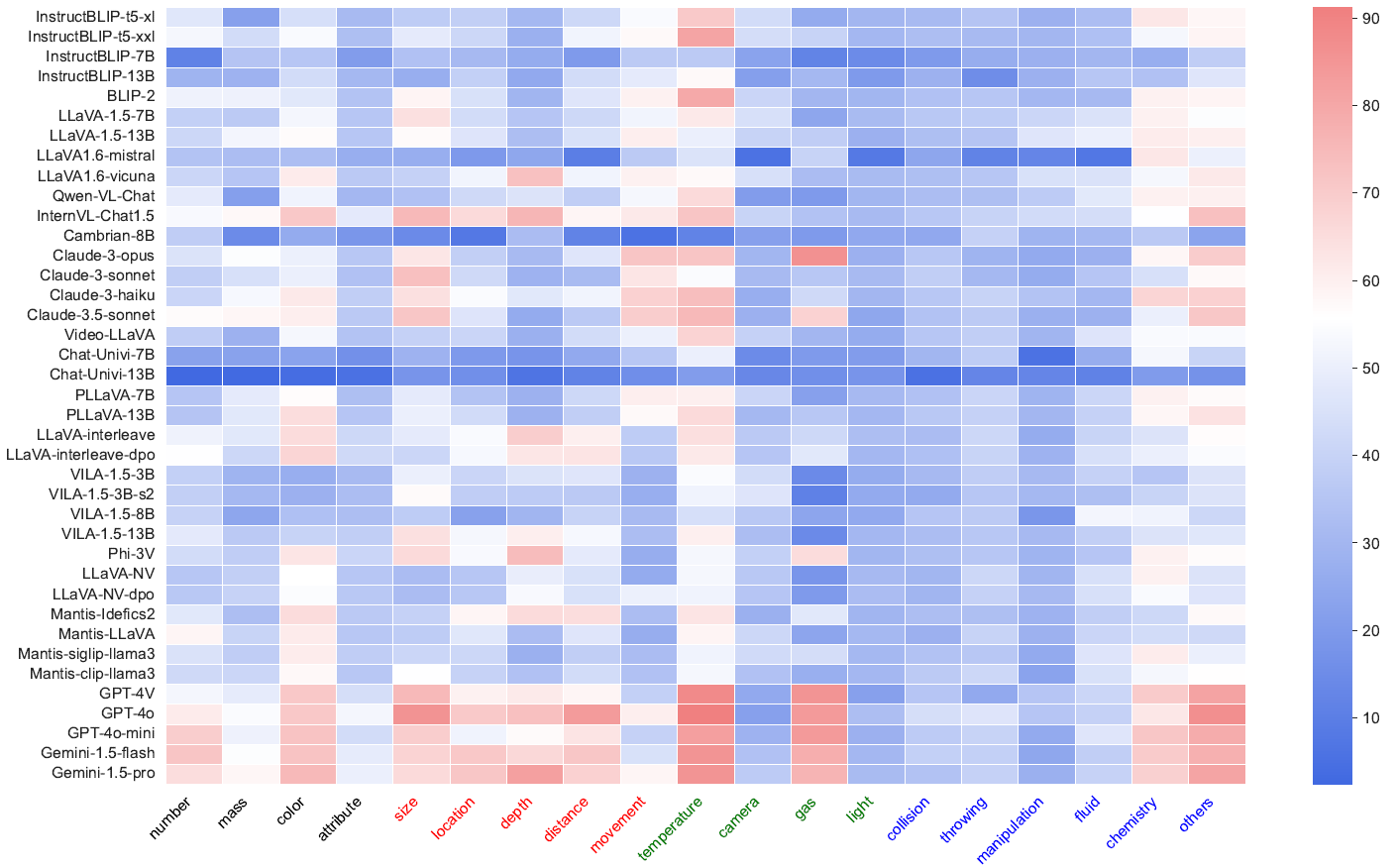
The visualization of model performance across 19 sub-tasks is presented, where different colors represent the respective categories.
The four colors, from left to right, represent physical object properties, physical object relationships, physical scenes, and physical-based dynamics.
To assess whether VLMs can understand the physical world, we evaluated 75 representative VLMs on
PhysBench and found that:
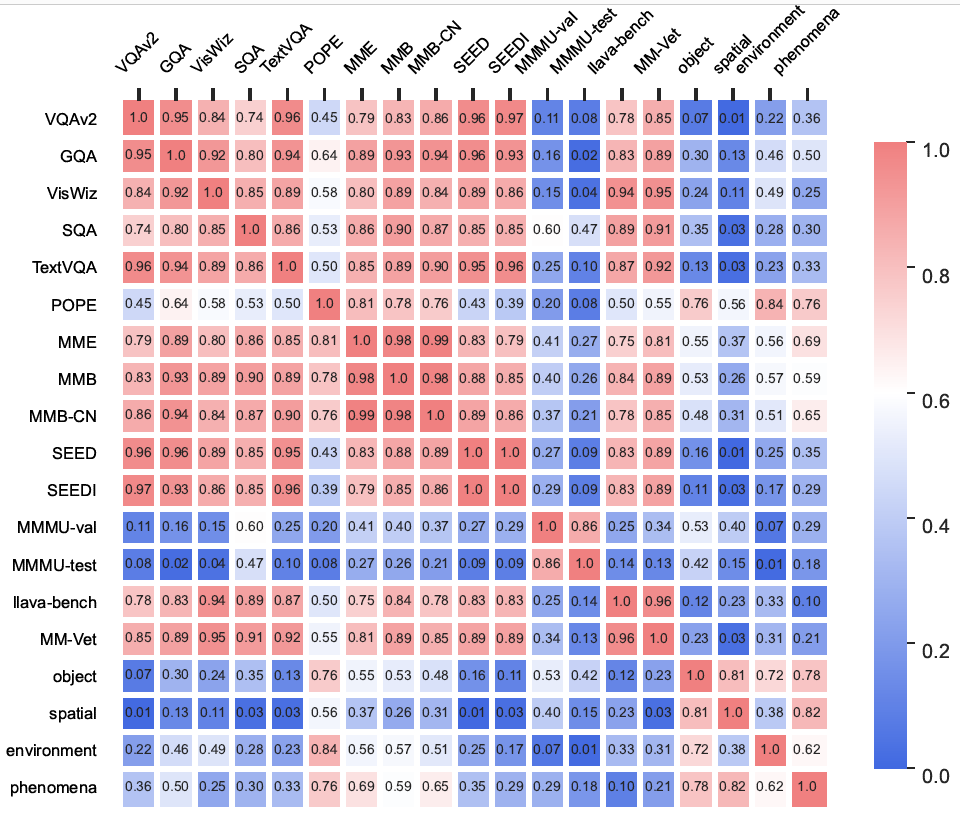
Correlation map between 4 tasks in
PhysBench. and 15 other vision-language benchmarks.
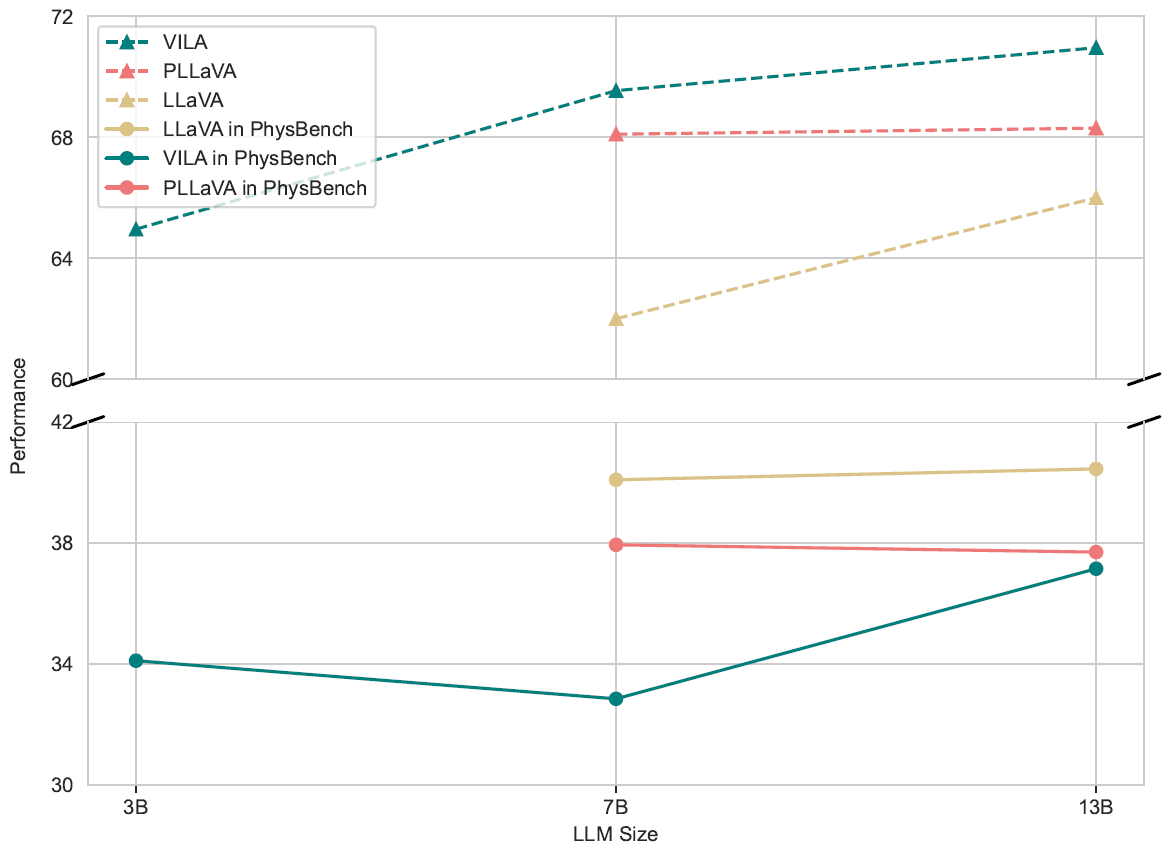
Model Size Scalability.
Data Scalability.
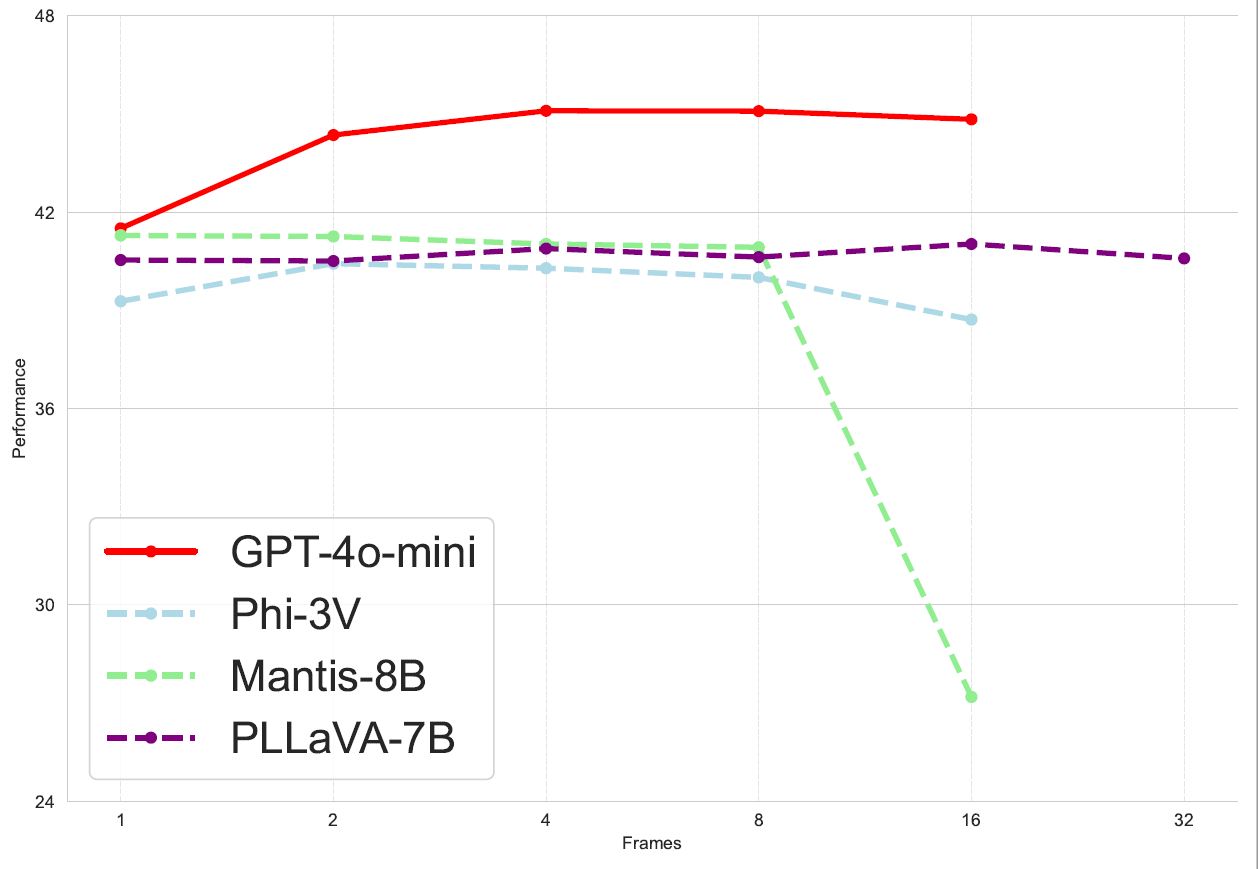
Frame Scalability.
We were perplexed by the fact that increasing the amount of training data did not improve the VLM's understanding of the physical world.
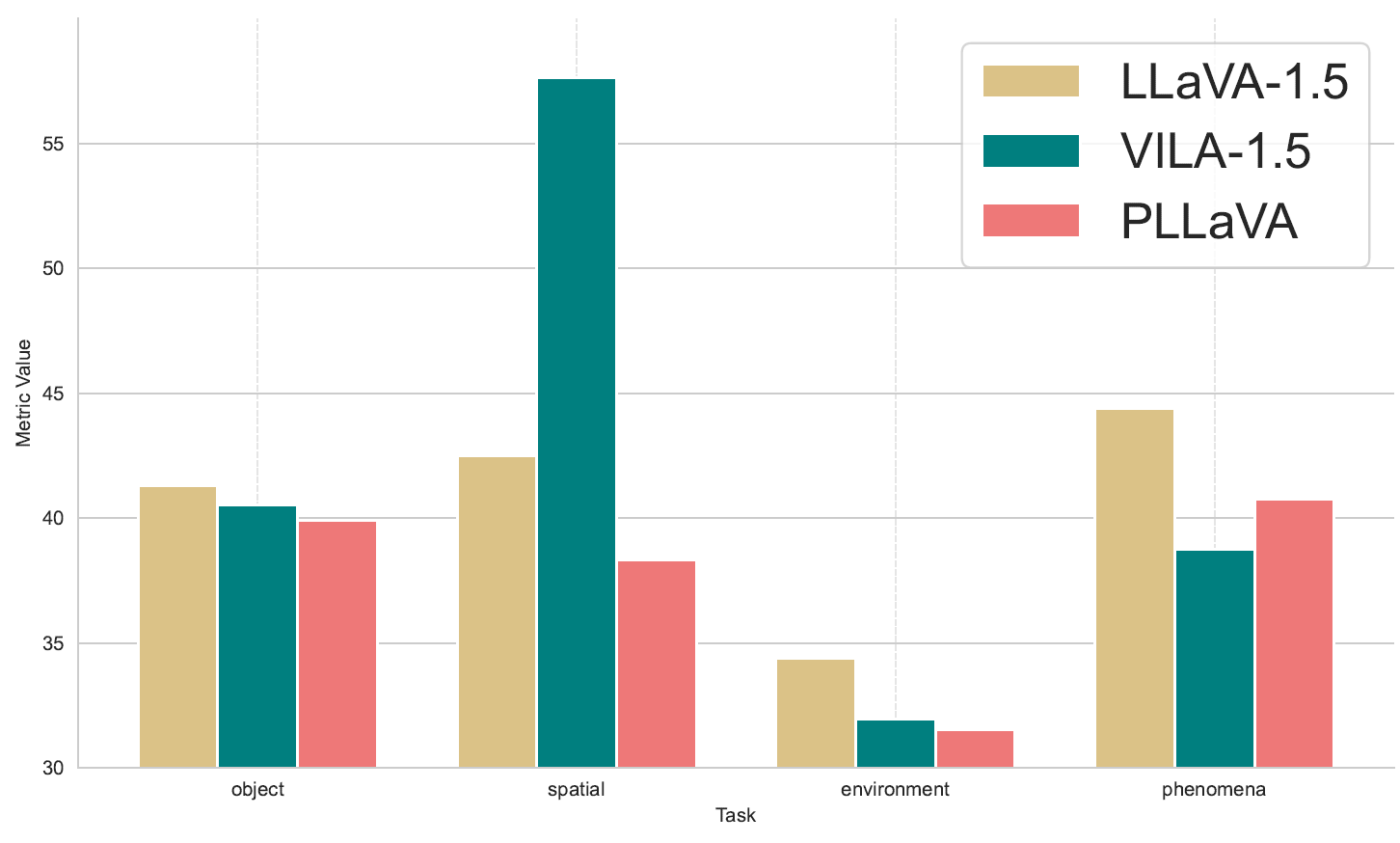
To investigate further, we examined the training datasets of LLaVA-1.5, VILA-1.5, and PLLaVA-1.5 and identified a lack of physical world knowledge in these datasets.
Additionally, keywords frequently encountered in
PhysBench are notably rare in the training data of these model.
This deficiency in relevant data likely contributes to the VLM's poor comprehension of physical world concepts.
We further support this hypothesis by analyzing the error distribution and fine-tuning the VLM in subsequent experiments.
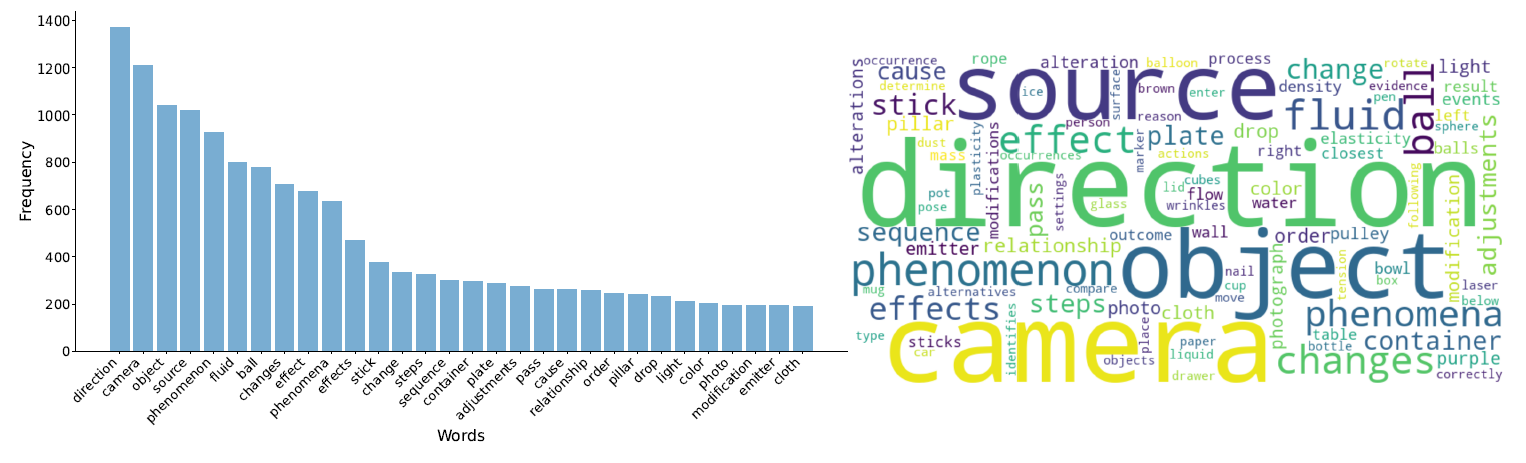
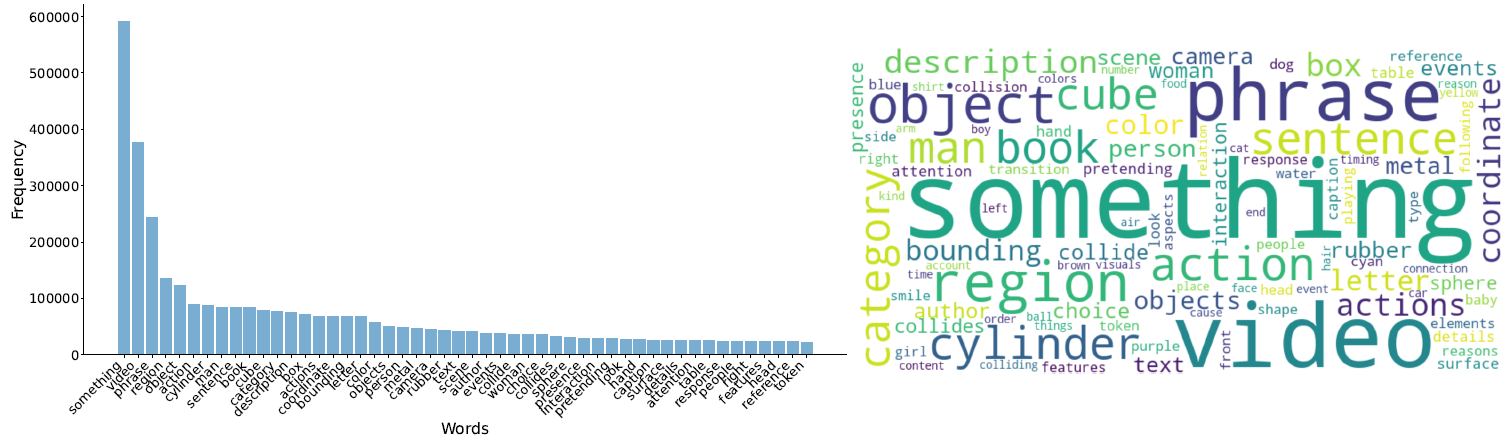
Word Statics and Word Cloud for
PhysBench.
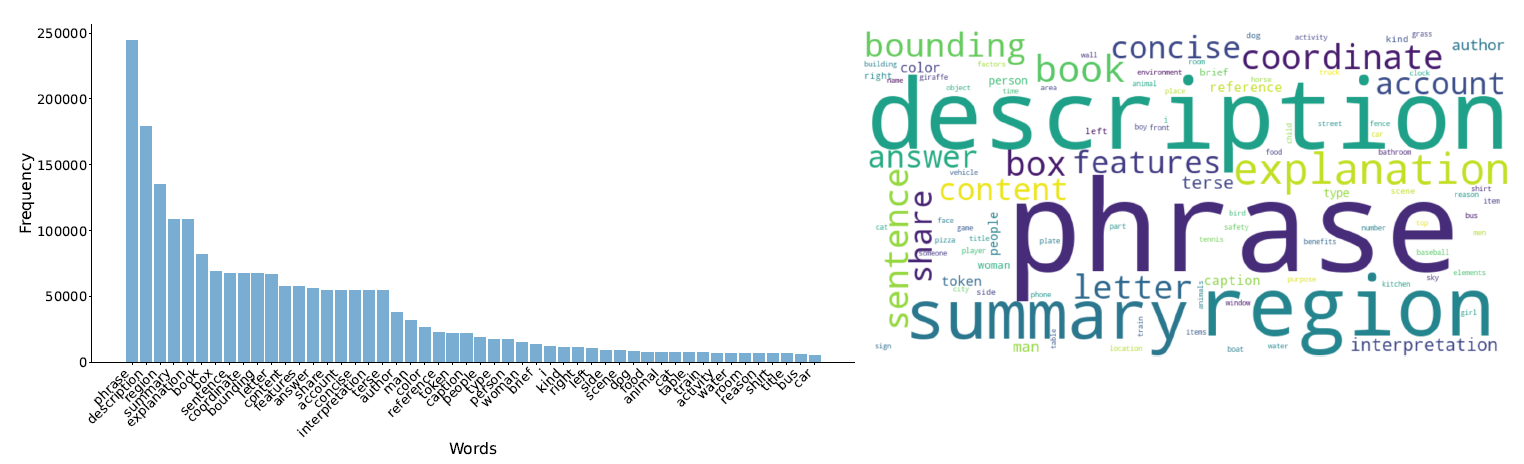
Word Statics and Word Cloud for LLaVA-1.5-13B Training Data.
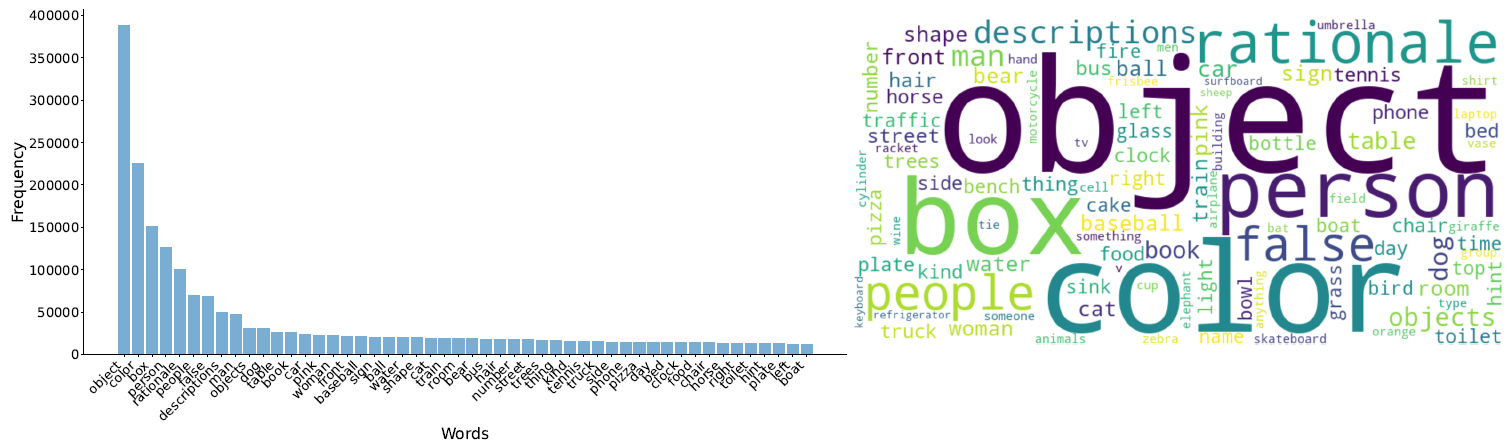
Word Statics and Word Cloud for VILA-1.5-13B Training Data.
Word Statics and Word Cloud for PLLaVA-13B Training Data.
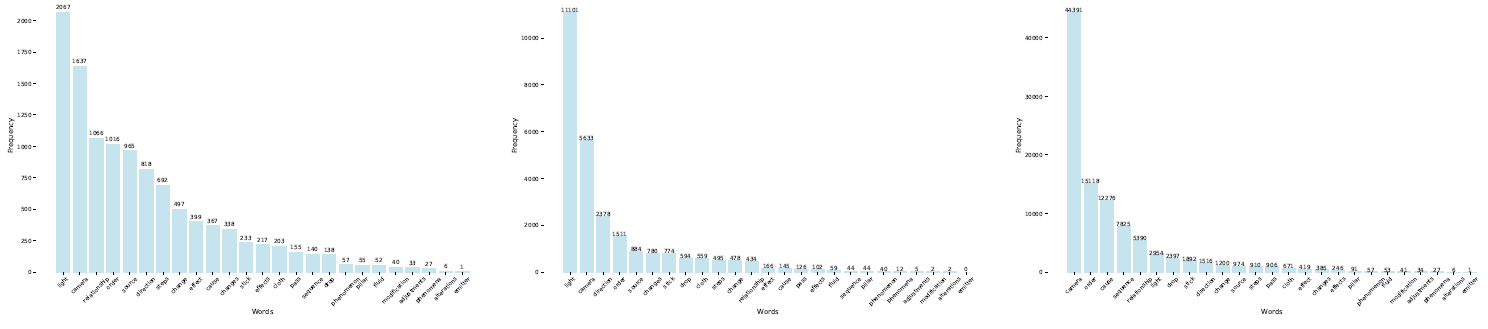
The frequency of common terms in
PhysBench within the training data of the LLaVA-1.5-13B, VILA-1.5-13B, and PLLaVA-13B models.
To investigate the poor performance of VLMs on
PhysBench, we randomly selected 500 questions and obtained explanations from
three models—GPT-4o, Phi-3V, and Gemini-1.5-flash. Expert annotators classified the root causes
of the mispredictions into six categories: perception errors, reasoning errors, lack of knowledge,
refusal to answer, failure to follow instructions, and annotation errors in the dataset.
We find that perceptual and knowledge gaps constitute the majority of errors.
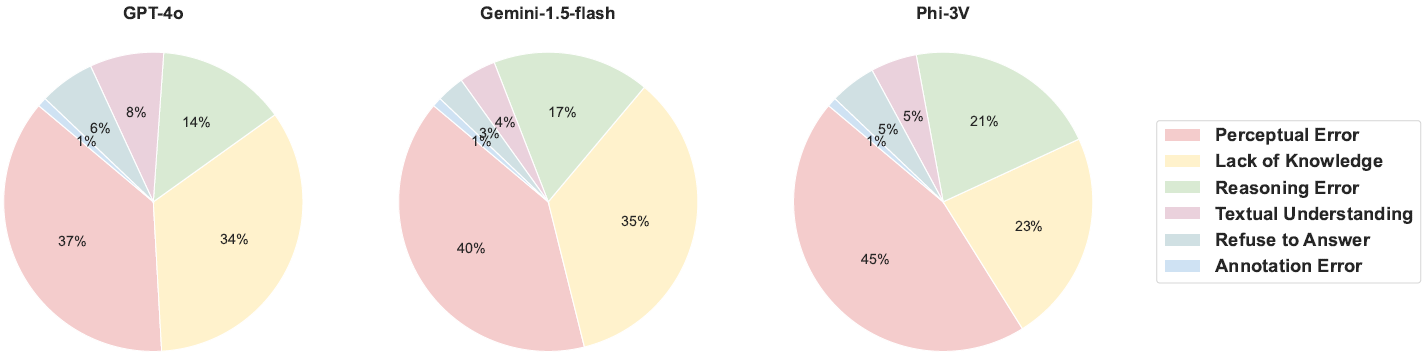
Distribution of error types for GPT-4V, Gemini-1.5-flash, Phi-3V.
Our error analysis revealed that inadequate physical
world knowledge and reasoning capabilities were key contributors to the models’ poor performance.
To investigate whether introducing additional examples could enhance performance, we
conducted tests on 200 entries of
PhysBench, pairing each with a similar example. These additional
examples were incorporated through fine-tuning or in-context learning. As shown in the below figure,
the performance improvements after adding physical world knowledge examples indicate that VLMs
can transfer physical knowledge to some extent. This suggests that the original data’s lack of physical
world knowledge was a significant factor in the models’ suboptimal performance.
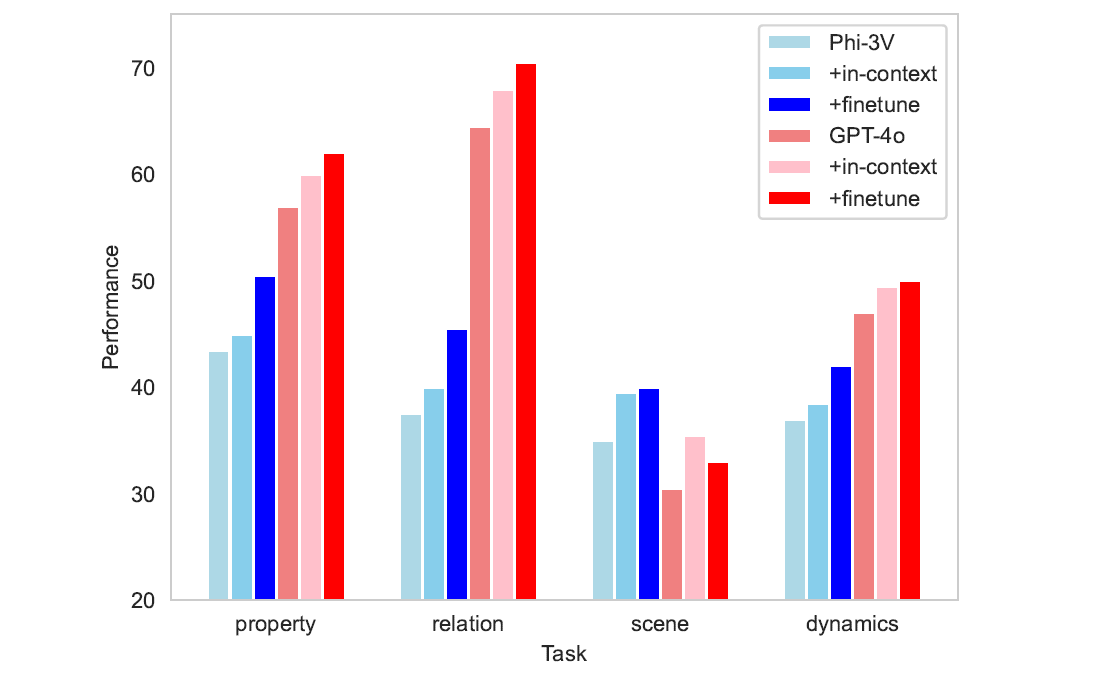
Physics knowledge transfer study.
@article{chow2025physbench,
title={PhysBench: Benchmarking and Enhancing Vision-Language Models for Physical World Understanding},
author={Chow, Wei and Mao, Jiageng and Li, Boyi and Seita, Daniel and Guizilini, Vitor and Wang, Yue},
journal={arXiv preprint arXiv:2501.16411},
year={2025}
}